Preparatory Work 3
Your ROS2 journey is almost complete, but before we dive into the final session, it is important to solidify your understanding of key concepts. In the final session, you will be working on a mini-project that will require you to apply your knowledge of topics and services. To ensure you are fully prepared, we have designed a challenge that will help you review these concepts using one of the most iconic ROS2 packages: turtlesim.
This challenge will serve as a foundation for the skills you will need in the mini-project, allowing you to approach the final task with confidence.
Additionally, as mentioned in Session 2, we have included a section to analyze the launch files used in the previous session. While this analysis is not mandatory, it offers valuable insights into how a URDF is handled in ROS2, the role of TFs in tracking robot motion, and the underlying mechanisms that bring robot simulations to life. Feel free to explore this section if you wish to enhance your background knowledge.
Turtlesim Overview
The turtlesim package is a well-known tool for beginners in ROS2, often used to introduce core concepts. It simulates a simple turtle in a 2D space, which you can control using various ROS2 tools.
Now it is time for you to try this turtle simulation:
Open a terminal and launch the turtlesim node with the following command:
ros2 run turtlesim turtlesim_node
A window with a turtle in the center should appear.
In a second terminal, start the teleop_turtle node to control the turtle:
ros2 run turtlesim turtle_teleop_key
This allows you to control the turtle using your keyboard’s arrow keys: ◄, ▲, ▼, ►. Try moving the turtle around the screen.
Warning
If the turtle does not move, ensure that the terminal running the teleop_turtle node is active. Click inside the terminal and try again.
Explore topics and services
Now that you have turtlesim running, let’s explore some of the topics and services it offers.
First, list the available topics:
ros2 topic list
This will display the topics that can be used to interact with the turtle. Two of them will be particularly useful for you.
Next, list the available services:
ros2 service list
The turtlesim package provides several services. You will use one of these to modify the turtle’s behavior.
Exercise 3
Now that you are familiar with turtlesim, let’s dive into a hands-on challenge!
Action Required
Please Download the turtlesim_challenge package required for this exercise and place it in the /src directory of your ros2_basics_ws workspace.
Then, build the workspace:
cd ~/ros2_basics_ws
colcon build --packages-select turtlesim_challenge
source install/setup.bash
Turtlesim Challenge
Modify the provided turtle_controller.py file in the turtlesim_challenge package to make the turtle:
Move in a spiral motion from the center of the screen
Stop automatically near the window edges
Change pen color when entering a new quadrant of the screen

Turtlesim challenge - Final result
To test your implementation, you will need to run the following two nodes in separate terminals:
ros2 run turtlesim turtlesim_node
ros2 run turtlesim_challenge turtle_controller
Steps
Determine the window limits
Identify \([x_{\text{min}}, x_{\text{max}}]\) and \([y_{\text{min}}, y_{\text{max}}]\).
Tip
Use the teleop_turtle node to move the turtle manually
Find the topic that publishes the turtle’s position and use it to determine the boundaries
Move the turtle
Update turtle_controller.py to publish velocity commands at a fixed rate (e.g. 2 Hz), making the turtle gradually move away from the center in a circular path.
Tip
Identify the topic used to control the turtle’s motion
Use
ros2 topic list -tto find the topic and its message typeUse
ros2 interface show <msg_type>to understand the message structure and how to use it to publish movement commandsDo not forget to import the required message type at the top of turtle_controller.py
Use a constant angular velocity and a slowly increasing linear velocity to create the spiral motion (e.g. angular.z = 1.0, linear.x starting at 0.05 and increasing by 0.05 over time)
Boundary detection
Stop the turtle when it reaches the boundary limits.
Tip
Subscribe to the position topic and monitor the turtle’s x and y coordinates
Compare the current position to the boundary values you identified in Step 1
Set the turtle’s velocity to zero to stop it
Pen color change
Use a turtlesim service to change the pen color when the turtle enters a new quadrant.
Tip
Use
ros2 service list -tto find the available services and their typesUse
ros2 interface show <srv_type>to understand how to call the pen serviceTrack the current quadrant and detect when the turtle moves into a different one
Use conditionals to avoid repeated service calls in the same quadrant
Warning
Call the service only when the turtle enters a new quadrant — not continuously while it is in the same one.
Note
To review the concepts from a different perspective, consider checking out this tutorial featuring the turtlesim package: ROS2 Tutorial
Simulation Underlays - Optional
This section is optional and is here to satisfy your curiosity if you wish to explore further. It dives into how simulation is achieved in ROS2, offering a detailed analysis of the underlying processes. In the previous session, we focused on creating a URDF file, or multiple Xacro files, that define the structure and properties of the Thymio robot. We then provided you with launch commands to visualize the robot in Rviz and Gazebo. However, behind the scenes, several essential ROS2 nodes are responsible for making this possible. In this section, we will break down these components and analyze how they work together, giving you a deeper understanding of the integration process.
Let’s run thymio_display_xacro.launch.xml, which enables us to visualize the Thymio model in Rviz and interact with a GUI to adjust joint positions, focusing on the robot’s structure without Gazebo.
Launch thymio_display_xacro.launch.xml
cd ~/ros2_basics_ws
source install/setup.bash
ros2 launch thymio_description thymio_display_xacro.launch.xml
Visualize the graph
rqt_graph
Configure the Node Graph

Looking at the rqt_graph, we see two main nodes interacting: joint_state_publisher and robot_state_publisher. The robot_state_publisher handles TFs in ROS2 by relying on joint information published by the joint_state_publisher. In this case, the joint_state_publisher is a GUI tool that lets us adjust joint positions virtually. In a real-world scenario, joint positions would be published by hardware sensors, such as encoders.

For the robot_state_publisher to work, it needs the URDF, which defines the robot’s structure and joint placements. This URDF file is passed as a parameter during the launch process. But where exactly can we find it? Let’s explore this:
List the different nodes
ros2 node list
List the parameter of the
robot_state_publishernode
ros2 param list /robot_state_publisher
Check the content of the robot_description parameter
ros2 param get /robot_state_publisher robot_description
Now that we have located the parameter containing the Thymio robot’s URDF, let’s take a closer look. This parameter holds the complete description of the robot, which was originally split across multiple files. Using the xacro tool, these files were combined into a single, unified URDF. You can confirm this in the terminal, where the file header states: This document was autogenerated by xacro.
To summarize, let’s refer to the following image for a visual representation:
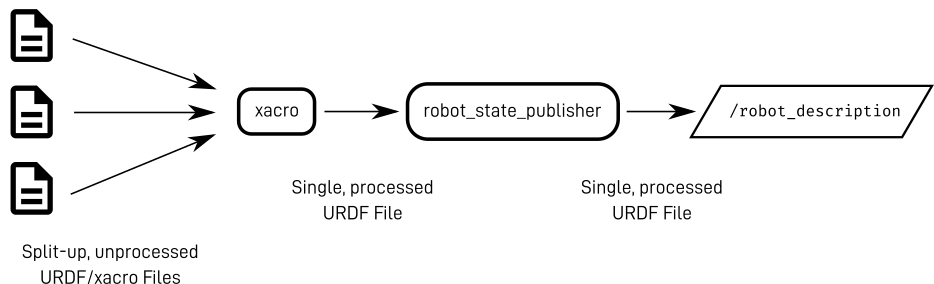
Here’s a quick recap of the roles of the two nodes:
robot_state_publisher:Updates the robot model and TFs in real-time
Requires the URDF file as a parameter to define the robot’s structure
Relies on joint position data to reflect changes in the robot’s state
joint_state_publisher:Provides virtual joint positions in simulation
Replaced by hardware sensors, such as encoders, in real-world applications
Having explored the key components of the launch process, let’s now run each node individually in separate terminals to verify if they produce the same outcome.
Run the
robot_state_publishernode
From the previous explanation, we need to launch the robot_state_publisher node and provide the URDF file as a parameter. Additionally, we must use the xacro tool to combine the Xacro files into a single URDF file.
ros2 run robot_state_publisher robot_state_publisher --ros-args -p robot_description:="$(xacro /home/ubuntu/ros2_basics_ws/install/thymio_description/share/thymio_description/urdf/thymio/thymio.urdf.xacro)"
Run the
joint_state_publishernode
ros2 run joint_state_publisher_gui joint_state_publisher_gui
Run Rviz
ros2 run rviz2 rviz2
At this stage, nothing is visible in Rviz. To proceed, you need to configure the interface with the required display settings. Start by adding the RobotModel and TF plugins, and then adjust their options as follows:

Note
If desired, you can save your current Rviz configuration to avoid reconfiguring everything each time. Save the configuration in the rviz directory of the thymio_description package by navigating to File > Save Config As in RViz and selecting the appropriate location. To try it out, adjust <config_name>.rviz in the following command with the name of your saved configuration:
ros2 run rviz2 rviz2 -d "/home/ubuntu/ros2_basics_ws/install/thymio_description/share/thymio_description/rviz/<config_name>.rviz"
Run rqt_graph
Finally, as expected, observe that the result matches exactly what was achieved using the thymio_display_xacro.launch.xml file, where the three executables are launched with identical arguments. The content of the launch file is provided below:
<launch>
<arg name="urdf_path"
default="$(find-pkg-share thymio_description)/urdf/thymio/thymio.urdf.xacro"/>
<arg name="rviz_config_path"
default="$(find-pkg-share thymio_description)/rviz/rviz_config.rviz" />
<node pkg="robot_state_publisher" exec="robot_state_publisher">
<param name="robot_description" value="$(command 'xacro $(var urdf_path)')"/>
</node>
<node pkg="joint_state_publisher_gui" exec="joint_state_publisher_gui"/>
<node pkg="rviz2" exec="rviz2" args="-d $(var rviz_config_path)" />
</launch>
Note
For comparison, below is the Python equivalent of the same launch file. While Python launch files can be slightly more complex to write, they offer greater flexibility.
import os
from launch_ros.actions import Node
from launch import LaunchDescription
from launch.substitutions import Command
from launch_ros.parameter_descriptions import ParameterValue
from ament_index_python.packages import get_package_share_path
def generate_launch_description():
urdf_path = os.path.join(get_package_share_path('thymio_description'),
'urdf', 'thymio.urdf.xacro')
rviz_config_path = os.path.join(get_package_share_path('thymio_description'),
'rviz', 'rviz_config.rviz')
robot_description = ParameterValue(Command(['xacro ', urdf_path]), value_type=str)
robot_state_publisher_node = Node(
package="robot_state_publisher",
executable="robot_state_publisher",
parameters=[{'robot_description': robot_description}]
)
joint_state_publisher_gui_node = Node(
package="joint_state_publisher_gui",
executable="joint_state_publisher_gui"
)
rviz2_node = Node(
package="rviz2",
executable="rviz2",
arguments = ["-d", rviz_config_path]
)
return LaunchDescription([
robot_state_publisher_node,
joint_state_publisher_gui_node,
rviz2_node
])
Now, let’s add the components needed to use the Thymio robot in Gazebo:
Launch thymio_display_xacro.launch.xml
ros2 launch thymio_description thymio_display_xacro.launch.xml
Launch Gazebo
ros2 launch gazebo_ros gazebo.launch.py
Spawn the Thymio in Gazebo
ros2 run gazebo_ros spawn_entity.py -topic robot_description -entity thymio
Note
These commands are provided by the gazebo_ros package, which serves as the interface connecting ROS2 and Gazebo.
At this stage, the Thymio robot should successfully spawn in Gazebo. However, you may notice warning messages in the terminal where thymio_display_xacro.launch.xml was started. These warnings occur due to a conflict between the joint_state_publisher_gui node and the gazebo_ros_diff_drive plugin, as both attempt to provide information about the wheel positions. To resolve this conflict, the joint_state_publisher_gui node must not be executed.
This adjustment was already implemented in the final launch file used at the end of the previous session. Below is the content of the final launch file, thymio.launch.xml:
<launch>
<arg name="urdf_path"
default="$(find-pkg-share thymio_description)/urdf/thymio/thymio.urdf.xacro"/>
<arg name="rviz_config_path"
default="$(find-pkg-share thymio_description)/rviz/rviz_config.rviz"/>
<node pkg="robot_state_publisher" exec="robot_state_publisher">
<param name="robot_description"
value="$(command 'xacro $(var urdf_path)')"/>
</node>
<node pkg="rviz2" exec="rviz2" output="screen"
args="-d $(var rviz_config_path)" />
<include file="$(find-pkg-share gazebo_ros)/launch/gazebo.launch.py">
<arg name="world" value="$(find-pkg-share thymio_description)/worlds/empty.world"/>
</include>
<node pkg="gazebo_ros" exec="spawn_entity.py"
args="-topic robot_description -entity thymio
-x 0.0 -y 0.0 -z 0.0
-R 0.0 -P 0.0 -Y 0.0"/>
</launch>
Note
In this launch file, you can modify the spawn position and orientation of the Thymio in Gazebo. Additionally, you can specify a custom world for the robot to spawn in.
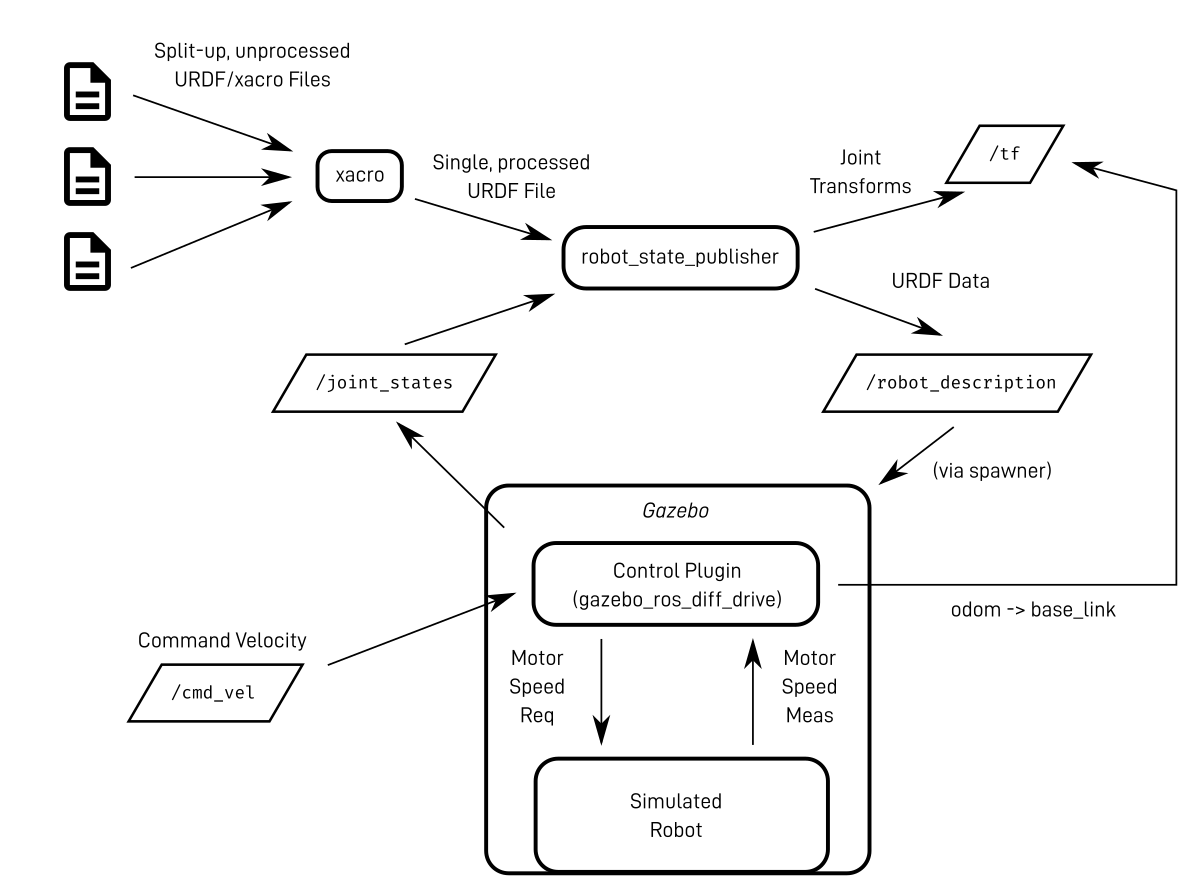
The diagram below provides a comprehensive summary of all the material covered, linking the key concepts and processes discussed throughout this chapter.